
پیوند ها

نام فایل : سیستم خودکار
فرمت : .ppt
تعداد صفحه/اسلاید : 79
حجم : 2 مگابایت
بنام خدا
Perception
مقدمه
یکی از مهمترین وظایف هر سیستم خودکار دریافت دانش از محیطش میباشد.
اینکار از طریق بکار گیری سنسورهای مختلف و استخراج اطلاعات مفید از داده های اندازه گیری شده میباشد.
رنج وسیعی از سنسورها در روباتهای خودکار مورد استفاده قرار میگیرد. در این فصل سنسورهائی مورد توجه قرار خواهند گرفت که برای دریافت اطلاعات از محیط بکار میروند.
مثالی از روبات
مثالی از روبات
دسته بندی سنسورها
دسته بندی سنسورها
داخلی: اطلاعاتی را از داخل روبات اندازه گیری میکنند. مثل: سرعت موتور، زاویه مفصل ها، ولتاژ باتری وغیره
خارجی: اطلاعاتی را از محیط روبات جمع آوری میکنند: اندازه گیری مسافت، شدت نور، دامنه صدا
Passive: سنسور انرژی را از محیط دریافت میکند مثل سنسور حرارتی، CCD ، و میکروفن
Active: انرژی را به محیط فرستاده وعکس العمل محیط در مقابل آنرا اندازه گیری میکند.
اندازه گیری کارائی سنسورها
اندازه گیری کارائی سنسورها
Dynamic Range
عبارت است از دامنه حد بالا و پائین مقادیر ورودی به سنسور به نحویکه سنسور قادر به عملکرد عادی خود باشد.
DR= Maximum Input/Minimum Input
معمولا بر حسب دسیبل بیان میشود.
اندازه گیری کارائی سنسورها
Resolution
حداقل اختلاف بین دو مقداری که توسط سنسور قابل دریافت است
Linearity
نحوه رفتار خروجی یک سنسور نسبت به تغییرات سیگنال ورودی را مشخص میکند
یک رفتار خطی با رابطه زیر مشخص میشود.
F(ax+by)= aF(x)+ bF(y)
اندازه گیری کارائی سنسورها
Bandwidth or Frequency
برای اندازه گیری سرعت سسک سنسور در آماده کردن دنباله ای از خروجی ها بکار میرود. بعبارت دیگر تعداد اندازه گیری های سنسور در ثانیه را به فرکانس تعبیر میکنند
Sensitivity
عبارت است از معیاری از میزان تغییرات جزئی در سیگنال ورودی که میتواند باعث تغییر در خروجی شود:
Output change / Input change
اندازه گیری کارائی سنسورها
Cross Sensitivity
عبارت است از حسساسیت به پارامترهای محیطی که متعامد با سیگنال اصلی هستند
یک قطب نما میتواند در جهت یابی روبات بر اساس میدان مغناطیسی زمین بسیار مفید باشد. اما این وسیله علاوه بر میدان مغناطیسی زمین به مصالح ساختمانی فلزی نیز حساسیت دارد. در نتیجه استفاده از آن برای روباتب که در محیط اتاق حرکت میکند چندان مفید نخواهد بود.
اندازه گیری کارائی سنسورها
اندازه گیری کارائی سنسورها
اندازه گیری کارائی سنسورها
مشکلات کار در محیط واقعی
مدل کردن خطا
Dead-reckoning localization
این روش مبتنی بر استفاده از سنسورهای داخلی است و معمولا با استفاده از انکدرها و سایر سنسورها تغییرات موقعیت و جهت نسبت به فریم مرجع روبات اندازه گیری میشود.
معمولا فیدبکی از محیط دریافت نمیشود. لذا احتمال بروز خطا در این روش وجود دارد.
روشی ساده وسریع است.
معمولا در ترکیب با سایر روشها استفاده میشود.
Dead-Reckoning
(0,0)
Dead-Reckoning
Accumulated error can be
quite big for a period time.
....
مبلغ قابل پرداخت 34,000 تومان
 فروش فیلتر بورسی استریکلی فقط 75 هزار تومان
فروش فیلتر بورسی استریکلی فقط 75 هزار تومان کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه
کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه روش درآمدزایی در خواب (تعجب نکنید! کلیک کنید و بخوانید)
روش درآمدزایی در خواب (تعجب نکنید! کلیک کنید و بخوانید) کسب و کار اینترنتی با درآمد میلیونی
کسب و کار اینترنتی با درآمد میلیونی ربات همه کاره اینستاگرام
ربات همه کاره اینستاگرام کسب درآمد از هوش مصنوعی ماهیانه حداقل ۱۲ میلیون تضمینی
کسب درآمد از هوش مصنوعی ماهیانه حداقل ۱۲ میلیون تضمینی کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !!
کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !! کسب درآمد ابدی و بی نهایت 100% واقعی
کسب درآمد ابدی و بی نهایت 100% واقعی مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته)
مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته) افزایش ممبر کانال، گروه و ربات تلگرام به صورت بی نهایت (اد ممبر)
افزایش ممبر کانال، گروه و ربات تلگرام به صورت بی نهایت (اد ممبر) دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی
دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو آموزش بازكردن انواع قفل ها بدون كليد(ويژه)
آموزش بازكردن انواع قفل ها بدون كليد(ويژه) آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade )
آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade ) کسب و کار اینترنتی در منزل
کسب و کار اینترنتی در منزل بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی
بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی
اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار
آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس
دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس کد های آماده html و css جهت یادگیری و طراحی سریع
کد های آماده html و css جهت یادگیری و طراحی سریع اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده 1403
اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده 1403 درامدزایی در خواب! (تعجب نکنید! بخوانید)
درامدزایی در خواب! (تعجب نکنید! بخوانید) نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی
نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی آموزش كامل تعمير لامپ كم مصرف(اختصاصي)
آموزش كامل تعمير لامپ كم مصرف(اختصاصي) نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی
نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی مدار داخلی واکی تاکی(اموزش ساخت)
مدار داخلی واکی تاکی(اموزش ساخت) کتاب افزایش ممبر کانال تلگرام
کتاب افزایش ممبر کانال تلگرام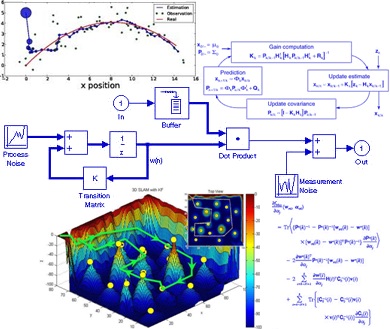 دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت
دانلود پاورپوینت فیلتر کالمن بر روی یک سنسور شتاب سنج برای تخمین سه متغیر حالت اندیکاتور ای کیو آپشن
اندیکاتور ای کیو آپشن

